|
ĪĪĪĪ╬„┐╦æ¬ė├

ĪĪĪĪĖ┼╩÷
ĪĪĪĪļSų°Š▀éõ╝»│╔░▓╚½╣”─▄Ą─ģfū„ÖCŲ„╚╦į┌╣żśIŅIė“Ą─╩ął÷Ę▌Ņ~▓╗öÓöU┤¾Ż¼Ųõęūė├ąį┼c┐ņ╦┘▓┐╩ā×ä▌╬³ę²┴╦┤¾┴┐æ¬ė├ĪŻĄ½į┌īŹļHæ¬ė├ųąŻ¼╚╦ÖCģfū„Ż©HRCŻ®Ą─░▓╚½Ę└ūoļyČ╚▀h│¼ė├æ¶ŅAŲ┌Ż¼ė╚Ųõ╩ŪÖCŲ„╚╦─®Č╦ł╠ąąŲ„ų▄ć·Ą─öDē║’LļUĘ└ūoŻ¼āHę└┐┐ÖCŲ„╚╦ūį╔ĒĄ─┴”║═╣”┬╩Ž▐ųŲ¤oĘ©ØMūŃ░▓╚½ąĶŪ¾ĪŻ─┐Ū░Ż¼ąąśIČÓ═©▀^įOų├┤¾ĘČć·Ę└ūoģ^ė“╗“╝ėčbć·Ö┌üĒ▒Żūo─®Č╦ł╠ąąŲ„╬ŻļUģ^ė“Ż¼šµš²Ą─╚╦ÖCģfū„æ¬ė├ļyęį┬õĄžĪŻ
ĪĪĪĪSICK ═Ų│÷Ą─ÖCŲ„╚╦▒█Č╦Ę└ūočbų├Ż©End-of-Arm-SafeguardŻ¼║åĘQ EOASŻ® Ż¼ū„×ķ╚½Ū“╩ū┐Ņßśī”ÖCŲ„╚╦╣żŠ▀║═╣ż╝■ģ^ė“Ą─ĘŪĮėė|╩ĮĘ└ūoĮŌøQĘĮ░ĖŻ¼ėąą¦ĮĄĄ═öDē║’LļUŻ¼×ķģfū„░▓╚½└Ē─Ņķ_▒┘╚½ą┬┐╔─▄ĪŻ
ĪĪĪĪ01
ĪĪĪĪąąśI▒│Š░┼c░▓╚½╠¶æ
ĪĪĪĪ1.1 ģfū„ÖCŲ„╚╦æ¬ė├¼FĀŅ
ĪĪĪĪĮ³─ĻüĒŻ¼Š▀éõ╝»│╔░▓╚½╣”─▄Ą─╣żśIģfū„ÖCŲ„╚╦╩ął÷Ę▌Ņ~’@ų°╠ß╔²ĪŻŲõ▓┘ū„▒ŃĮ▌Īó▓┐╩čĖ╦┘Ą─╠ž³cŻ¼╩╣Ųõį┌▒ŖČÓŅIė“Š▀éõĖ▀╬³ę²┴”Ż¼┤¾ęÄ─Ż┬õĄž╚╦ÖCģfū„æ¬ė├Ą─Ū░Š░į°×ķÖCŲ„╚╦ąąśIūó╚ļÅŖä┼äė┴”ĪŻ
ĪĪĪĪĄ½īŹļHł÷Š░ųąŻ¼╚╦ÖCģfū„æ¬ė├Ą─░▓╚½Ę└ūo┤µį┌ųTČÓÅ═ļså¢Ņ}Ż║ÖCŲ„╚╦─®Č╦ł╠ąąŲ„Ż©╣żŠ▀Ż®╝░╦∙öyĦ╣ż╝■Ą─öDē║’LļUĘ└ūoļyČ╚śOĖ▀Ż¼āHę└┐┐ÖCŲ„╚╦ūį╔ĒĄ─┴”║═╣”┬╩Ž▐ųŲŻ¼¤oĘ©▀_ĄĮ└ĒŽļĄ─░▓╚½Ę└ūoą¦╣¹Ż¼ī¦ų┬šµš²Ą─╚╦ÖCģfū„æ¬ė├▌^╔┘īŹ¼FĪŻ
ĪĪĪĪ1.2 ║╦ą─░▓╚½╠¶æ
ĪĪĪĪį┌ģfū„ÖCŲ„╚╦æ¬ė├ųąŻ¼┴”┐žą═ÖCŲ„╚╦ļm─▄į┌│¼▀^įOČ©┴”Ž▐Ģr═Żų╣▀\ąąŻ¼ĮY║ŽÖCąĄįOėŗ┼cŲõ╦¹░▓╚½┤ļ╩®Ż¼┐╔Ž▐ųŲÖCŲ„╚╦╩ų▒█┼c╚╦¾w┼÷ū▓╗“öDē║ĢrĄ─Įėė|ē║┴”Ż¼▒▄├Ōć└ųžé¹║”ĪŻĄ½╚į├µ┼RęįŽ┬ĻPµI╠¶æŻ║
ĪĪĪĪ•╚ń║╬Ę└ūoÖCŲ„╚╦╣żŠ▀╝░╣ż╝■ų▄ć·ģ^ė“Ą─░▓╚½Ż┐
ĪĪĪĪ•╚ń║╬īŹ¼F╝ŌõJ / ėą└ŌĮŪ╬’¾wĄ─ģfū„╩Į░ß▀\Ż┐
ĪĪĪĪ•╚ń║╬╠ß╔²╣ż╚╦ī”ģfū„æ¬ė├░▓╚½ąįĄ─šJ┐╔Č╚Ż┐
ĪĪĪĪ•╚ń║╬ŲĮ║Ō░▓╚½Ę└ūo┼c╔·«aą¦┬╩Ż┐
ĪĪĪĪ•╚ń║╬ĮĄĄ═╝»│╔╔╠┼cĮKČ╦ė├æ¶į┌ģfū„░▓╚½╣ż│╠ĘĮ├µĄ─ļyČ╚Ż¼▓óīŹ¼FęÄ─Ż╗»æ¬ė├Ż┐
ĪĪ
ĪĪĪĪ02
ĪĪĪĪ╣żū„įŁ└Ē┼cæ¬ė├Śl╝■
ĪĪĪĪ2.1 ╗∙▒Š╣żū„įŁ└Ē
ĪĪĪĪEOAS į┌ÖCŲ„╚╦╣żŠ▀║═╣ż╝■ų▄ć·╔·│╔Ę└ūoģ^ė“Ż¼«öĘ└ūoģ^ė“▒╗Ūų╚ļĢrŻ¼┴ó╝┤ė|░lÖCŲ„╚╦£p╦┘╗“░▓╚½═Żų╣ĪŻ
ĪĪĪĪąĶūóęŌŻ║ė╔ė┌╣½▓ŅĪóą┼╠¢╠Ä└Ē╝░ÖCŲ„╚╦ųŲäėĢrķgĄ─ė░ĒæŻ¼ÖCŲ„╚╦ŖAŠ▀║═╣ż╝■ų▄ć·Ą─Ę└ūoģ^ė“ķLČ╚Ż¼▒žĒÜ┤¾ė┌ “╬ŻļUĘČć·”Ż©╝┤Å─é„ĖąŲ„Ū░Ų┴£y┴┐Ą─╣żŠ▀║═╣ż╝■ķLČ╚Ż®ĪŻ
ĪĪĪĪ║╦ą─ļyŅ}Ż║«öÖCŲ„╚╦┐┐Į³▒Ē├µū„śIĢrŻ¼╚ń║╬ģ^Ęųé„ĖąŲ„ęĢę░ųąĄ─▓┘ū„╚╦åT╩ų▓┐┼c│ŻęÄ╬’¾wŻ┐┐╔═©▀^ “╣ż╦ć³cĮėĮ³” ╗“ “╣ż╦ć┬ĘÅĮ” ╣”─▄ĮŌøQŻ©įöęŖŽ┬╬─Ż®ĪŻ
ĪĪĪĪ2.2 ĻPµI╣”─▄įŁ└Ē
ĪĪĪĪ2.2.1 ╣ż╦ć³cĮėĮ³
ĪĪĪĪŻ©Process Point ApproachŻ®
ĪĪĪĪ×ķģ^Ęųé„ĖąŲ„ęĢę░ųąĄ─│ŻęÄ╬’¾w┼c▓┘ū„╚╦åT╩ų▓┐Ż¼EOAS ▓╔ė├ “╣ż╦ć³c” ĘĮĘ©Ż║
ĪĪĪĪ╣ż╦ć³cĮėĮ³┴„│╠Å─ “▀M╚ļ³c” ķ_╩╝Ż¼ÖCŲ„╚╦čž z ▌SŻ©Å─ÖCŲ„╚╦╣żŠ▀Ę©╠męĢĮŪŻ®Ž“╩░╚Ī╬╗ų├Ż©╝┤ “╣ż╦ć³c”Ż®ū÷ų▒ŠĆ▀\äėŻ¼═Ļ│╔║¾čžįŁ┬ĘÅĮĘĄ╗ž▀M╚ļ³cĪŻ
ĪĪĪĪŠÄ│╠ļAČ╬Ż¼īó╔Ž╩÷ĮėĮ³▀\äė┼cé„ĖąŲ„£y┴┐öĄō■ū„×ķģó┐╝─Żą═┤µā”ĪŻ
ĪĪĪĪūįäė▀\ąąļAČ╬Ż¼«öÖCŲ„╚╦į┘┤╬ĮėĮ³═¼ę╗╣ż╦ć³cĢrŻ¼īóīŹļHĮėĮ³Ū·ŠĆ┼cģó┐╝─Żą═ī”▒╚Ż╗╚¶Ųź┼õŻ¼ÖCŲ„╚╦┐╔└^└m┐┐Į³▒Ē├µŻ╗╚¶▓╗Ųź┼õŻ©╚ń╩ų▓┐Ūų╚ļĘ└ūoģ^ė“╗“╣ż╦ć³cŁhŠ│ūā╗»Ż®Ż¼EOAS ┴ó╝┤┐žųŲÖCŲ„╚╦░▓╚½═Żų╣ĪŻ
ĪĪĪĪ2.2.2 ╣ż╦ć┬ĘÅĮŻ©Process PathŻ®
ĪĪĪĪī”ė┌Å═ļsĄ─ÖCŲ„╚╦▀\äėŻ¼┐╔▓╔ė├ “╣ż╦ć┬ĘÅĮ” ╠µ┤· “╣ż╦ć³c”Ż║
ĪĪĪĪ╣ż╦ć┬ĘÅĮų¦│ų╚╬ęŌĘĮŽ“ĪóĮŪČ╚Ą─ÖCŲ„╚╦▀\äėŠÄ│╠Ż¼Å─ “▀M╚ļ³c” ķ_╩╝Ż¼čžūįČ©┴x┬ĘÅĮ▀\äėŻ¼ūŅĮKĄĮ▀_ “═╦│÷³c”
ĪĪĪĪŠÄ│╠═Ļ│╔║¾Ż¼īó┬ĘÅĮ┼cé„ĖąŲ„£y┴┐öĄō■ū„×ķģó┐╝─Żą═┤µā”
ĪĪĪĪūįäė▀\ąąļAČ╬Ż¼ÖCŲ„╚╦čž╣ż╦ć┬ĘÅĮ▀\äėĢrŻ¼īŹĢrī”▒╚īŹļH┬ĘÅĮöĄō■┼cģó┐╝─Żą═Ż╗╚¶Ųź┼õŻ¼└^└m▀\äėŻ╗╚¶▓╗Ųź┼õŻ©╚ń╩ų▓┐Ūų╚ļ╗“┬ĘÅĮŁhŠ│ūā╗»Ż®Ż¼┴ó╝┤░▓╚½═Żų╣
ĪĪĪĪę¬Ū¾Ż║▀M╚ļ³c┼c═╦│÷³cąĶ╠Äė┌ “ūįė╔┐šķg”Ż©¤oé„ĖąŲ„Ę└ūoģ^ė“Ūų╚ļŻ®
ĪĪĪĪ2.2.3 ╚╦žøĘųļxŲĮ├µŻ©Muting PlaneŻ®
ĪĪĪĪEOAS ╚╦žøĘųļx╣”─▄┐╔īóÖCŲ„╚╦╣żū„┐šķgäØĘų×ķģfū„ģ^ė“┼cĘŪģfū„ģ^ė“Ż║
ĪĪĪĪ•«öÖCŲ„╚╦╣żŠ▀Ę©╠m┤®▀^╚╦žøĘųļxŲĮ├µ▀M╚ļĘŪģfū„ģ^ė“ĢrŻ¼EOAS ░▓╚½╣”─▄Ģ║═Ż
ĪĪĪĪ•«öÖCŲ„╚╦ĘĄ╗žģfū„ģ^ė“ĢrŻ¼EOAS ░▓╚½╣”─▄ųžą┬╝ż╗Ņ
ĪĪĪĪ•ūóęŌŻ║ĘŪģfū„ģ^ė“ąĶĖ∙ō■æ¬ė├īŻī┘░▓╚½ĘĮ░ĖŻ¼═©▀^Ųõ╦¹ĘĮ╩Į┤_▒Ż░▓╚½
ĪĪ
ĪĪĪĪ03
ĪĪĪĪæ¬ė├ŅIė“┼cł÷Š░
ĪĪĪĪ3.1 ║╦ą─æ¬ė├ŅIė“
ĪĪĪĪ─┐Ū░Ż¼EOAS ų„ę¬▀mė├ė┌ęįŽ┬ģfū„ÖCŲ„╚╦æ¬ė├ł÷Š░Ż¼║¾└mīó═©▀^ EOAS URCap ▄ø╝■╔²╝ēŻ¼═žš╣ų┴³c─zĪóöQ┬▌Įz╝░ĘŪ░▓╚½ūįäė╗»╣”─▄Ą╚ŅIė“Ż║
ĪĪĪĪ•╩░╚Ī┼cĘ┼ų├Ż©Pick & PlaceŻ®
ĪĪĪĪ•čbąČ┴ŽŻ©Machine TendingŻ®
ĪĪĪĪ•░ß▀\┼cčb┼õŻ©Handling & AssemblyŻ®
ĪĪĪĪ3.2 Ąõą═æ¬ė├ł÷Š░
ĪĪĪĪł÷Š░ 1Ż║░ļūįäė┘|┴┐Öz£y
ĪĪĪĪ┘|┴┐╣ż│╠Ĥį┌Į³ŠÓļxĘų╬÷ÖCŲ„╚╦╠ß╣®Ą─Öz£yī”Ž¾ĢrŻ¼EOAS ┐╔Ę└ūo▓┘ū„╚╦åT╩ų▓┐├Ō╩▄öDē║’LļUŻ╗īŹ¼F╩ųäė┼cūįäė╗»┴„│╠Ą─░▓╚½ĮY║ŽŻ¼╝╚╣Ø╩Ī┐šķgŻ¼ėų╠ß╔²╣ż╚╦šJ┐╔Č╚ĪŻ
ĪĪĪĪł÷Š░ 2Ż║Ž“ÖCŲ„┴„│╠╦═┴Ž
ĪĪĪĪ▓╔ė├ EOAS Ę└ūo╬ŻļUĄ─╣żŠ▀ / ╣ż╝■ģ^ė“Ż¼╠µ┤·ÖCŲ„╚╦ų▄ć·Ą─┤¾ĘČć·Æ▀├ĶĘ└ūoŻ╗īó░▓╚½╦∙ąĶ┐šķgĮĄų┴ūŅĄ═Ż¼╠žäe▀m║Ž¬MąĪū„śIŁhŠ│ĪŻ
ĪĪĪĪł÷Š░ 3Ż║╚╦åT┼cÖCŲ„╚╦╣▓═¼┐┐Į³╣ż╝■┴Ž▒P
ĪĪĪĪ▓┘ū„╚╦åTŽ“╣ż╝■┴Ž▒Pča┴ŽĢrŻ¼ÖCŲ„╚╦┐╔š²│Ż▀\ąąŻ¼¤oąĶš¹¾w═ŻÖCŻ¼╠ß╔²╠Ä└Ēą¦┬╩Ż╗īŹ¼F╚╦ÖCģfū„¤o╩ų▓┐öDē║’LļUŻ¼į÷ÅŖ╣ż╚╦Įė╩▄Č╚ĪŻ
ĪĪ
ĪĪĪĪ04
ĪĪĪĪĘ■äš┼cų¦│ų¾wŽĄ
ĪĪĪĪ4.1 ģfū„ÖCŲ„╚╦░▓╚½Ę■äš
ĪĪĪĪSICK ╠ß╣®╚½ĘĮ╬╗Ą─ģfū„┼cģf═¼ÖCŲ„╚╦░▓╚½Ę■䚯¼Š▀¾w╚ńŽ┬Ż║
ĪĪ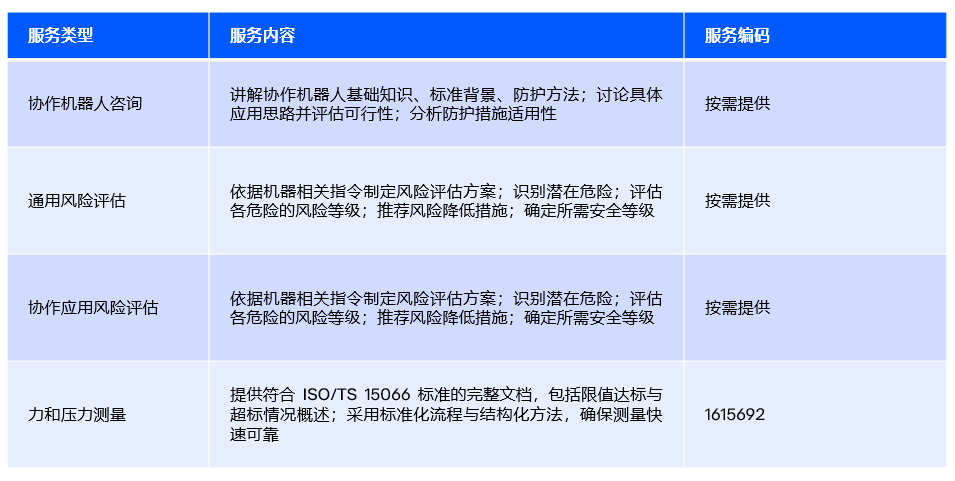
ĪĪĪĪ4.2 «aŲĘ┼cæ¬ė├ų¦│ų
ĪĪĪĪSICK Į©┴ó╚²╝ēų¦│ų¾wŽĄŻ¼▒ŻšŽ EOAS «aŲĘ┬õĄž┼cæ¬ė├Ż║
ĪĪĪĪę╗╝ēų¦│ųŻ║ė╔Ė„ųąć°Ė„Ąžė“õN╩█å╬╬╗╠ß╣®æ¬ė├ų¦│ų
ĪĪĪĪČ■╝ēų¦│ųŻ║ė╔SICKīŻśIĄ─░▓╚½ĮŌøQĘĮ░ĖłFĻĀ╠ß╣®╝╝ąg┼cæ¬ė├ų¦│ų
ĪĪĪĪ╚²╝ēų¦│ųŻ║ė╔æ┬į«aŲĘ╣▄└Ē┼cčą░lłFĻĀ╠ß╣®ų¦│ų
ĪĪ
ĪĪĪĪSICK
ĪĪĪĪ³cō¶Ž┬ĘĮęĢŅl╠¢Ż¼×gė[Ė³ČÓęĢŅl
ĪĪ
ĪĪ
|

